Data
The indoor motion capture dataset (MPI08) used in the CVPR 2010 paper is freely available for your own tests and experiments.
The data is only for research purposes. If you use this data, please acknowledge the effort that went into data collection by citing the corresponding papers
Multisensor Fusion for 3D Full-Body motion capture pdfBibTeX and
Analyzing and Evaluating Markerless Motion Tracking Using Inertial Sensors pdf BibTeX
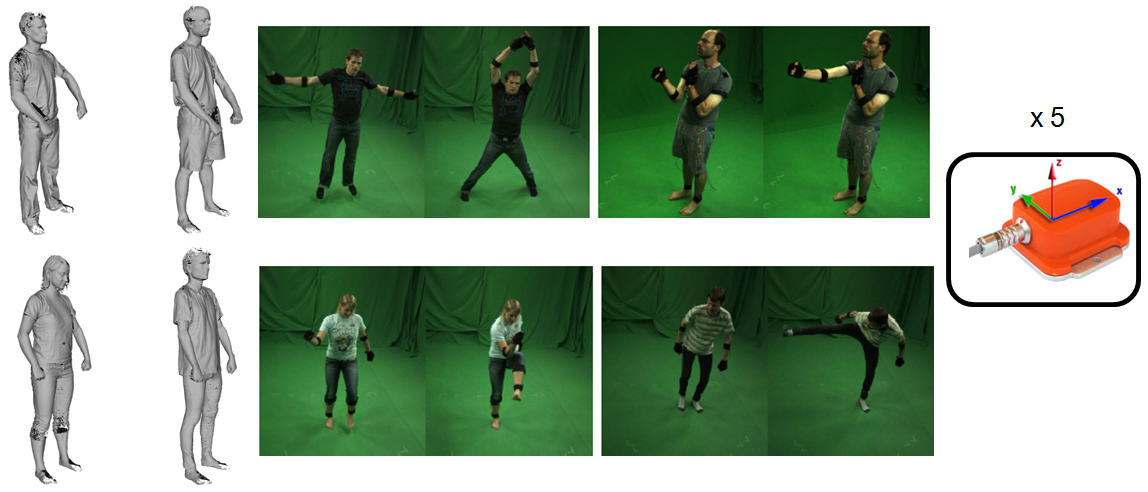
The dataset consists of:
- sequences : multi-view sequences obtained from 8 calibrated cameras.
- silhouettes : binary segmented images obtained with chroma-keying.
- meshes : 3D laser scans for each of the four actors in the dataset and also the registered meshes with inserted skeletton.
- projection matrices : one for each of the 8 cameras.
- orientation data : raw and calibrated and sensor orientation data (5 sensors)
3D scans | Multiview sequences | 5 sensors |
The full dataset can be downloaded directly from here. The sequences for each of the four actors ab,hb,br,mm, are included as compressed h.264 with high quality. Additionally, we include the segmented silhouettes for all the database. The silhouettes are run-length encoded (loss-less) for efficiency.
This matlab
demo script shows how to read and use the data in MPI08.It loads a mesh and a sequence and plots the 3D model with the sensor orientations in the first frame and the projection of the model into the first frame.
Note: The videos are compressed with high quality, however if you would like to obtain the sequences as lossless png images please contact
pons@tnt.uni-hannover.de
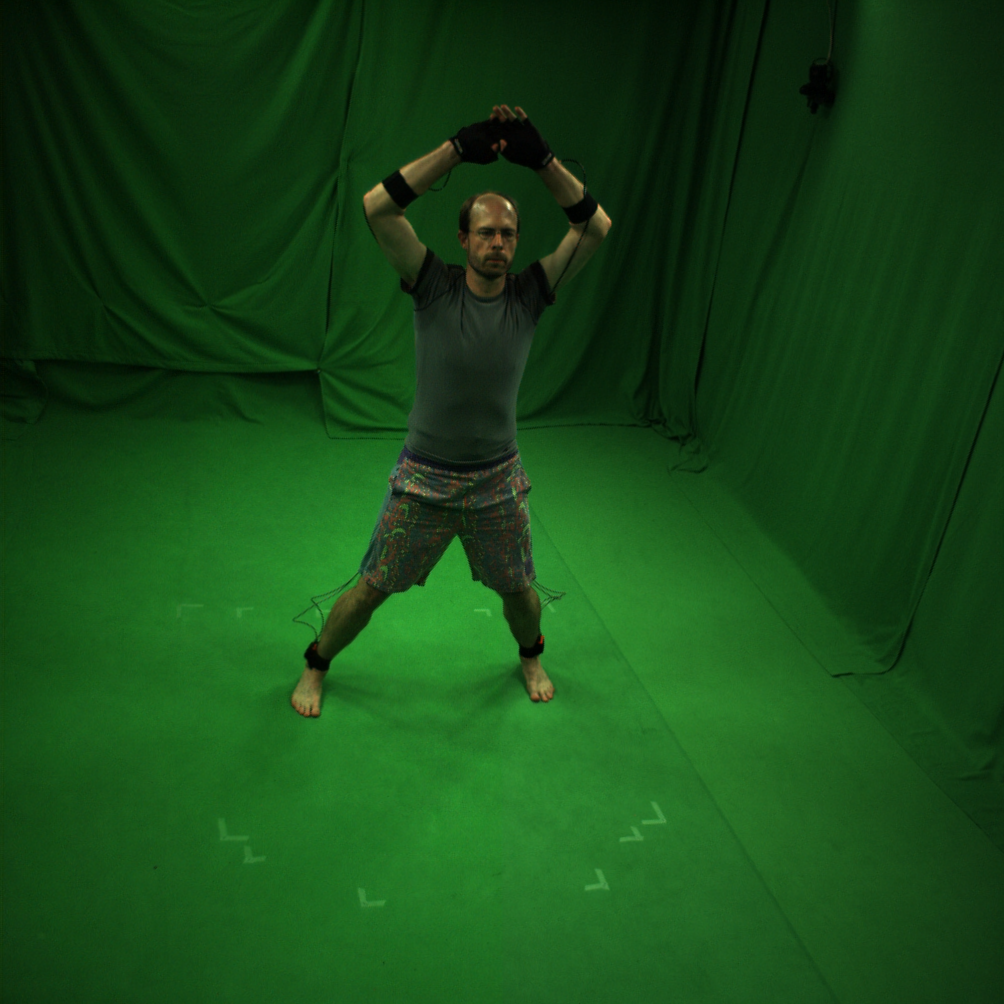
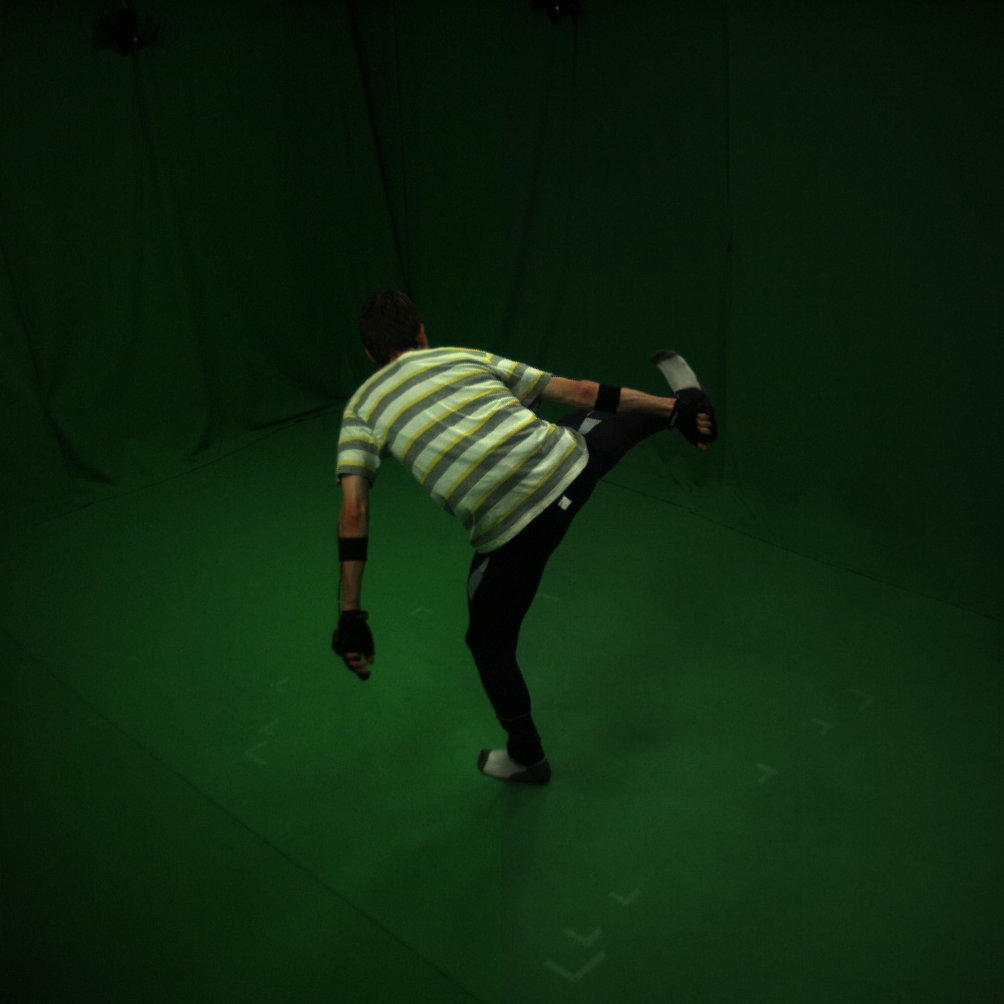
Example sequences in the database (Click on the images to see the multi-view sequences ! )
Cartwheel
|

|
Jumping jack and skiing
|
|
Rotating both arms
|

|
Kicking
|
|