 Many medical procedures rely on detailed analysis of the human motion apparatus. In this context correspondences between motion patterns and hidden physical parameters like joint torques are highly interesting. To gain accurate information about the correlation between patient specific body parameters, the internal forces acting on joints and a healthy movement, a framework is required, that combines all of these characteristics.
Many medical procedures rely on detailed analysis of the human motion apparatus. In this context correspondences between motion patterns and hidden physical parameters like joint torques are highly interesting. To gain accurate information about the correlation between patient specific body parameters, the internal forces acting on joints and a healthy movement, a framework is required, that combines all of these characteristics.
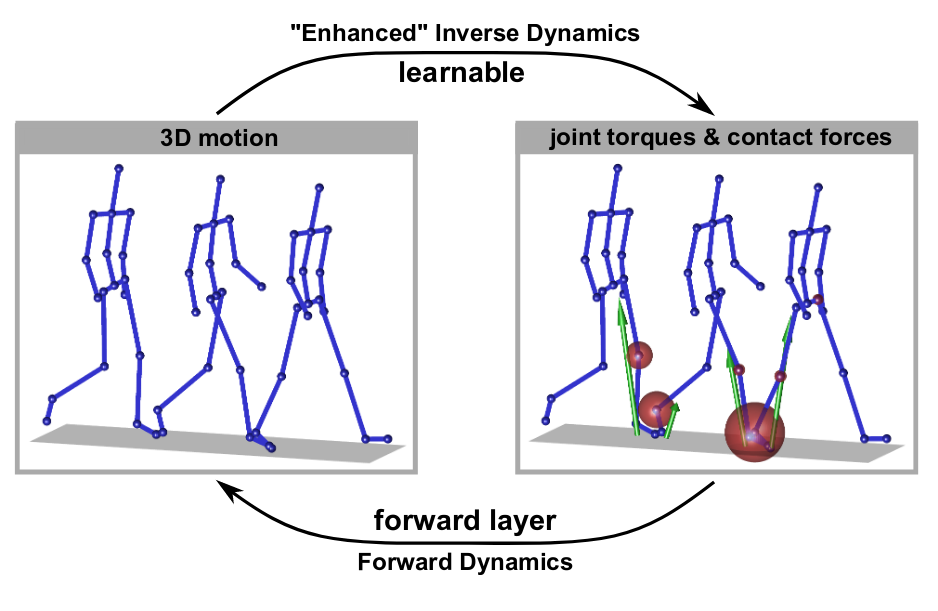
The project aims at a direct access to physical properties of an investigated motion without the necessity of tedious simulation using inverse or forward dynamics. By use of machine learning techniques the computational expense can be reduced and the need for expensive equipment like force plates is extinct.
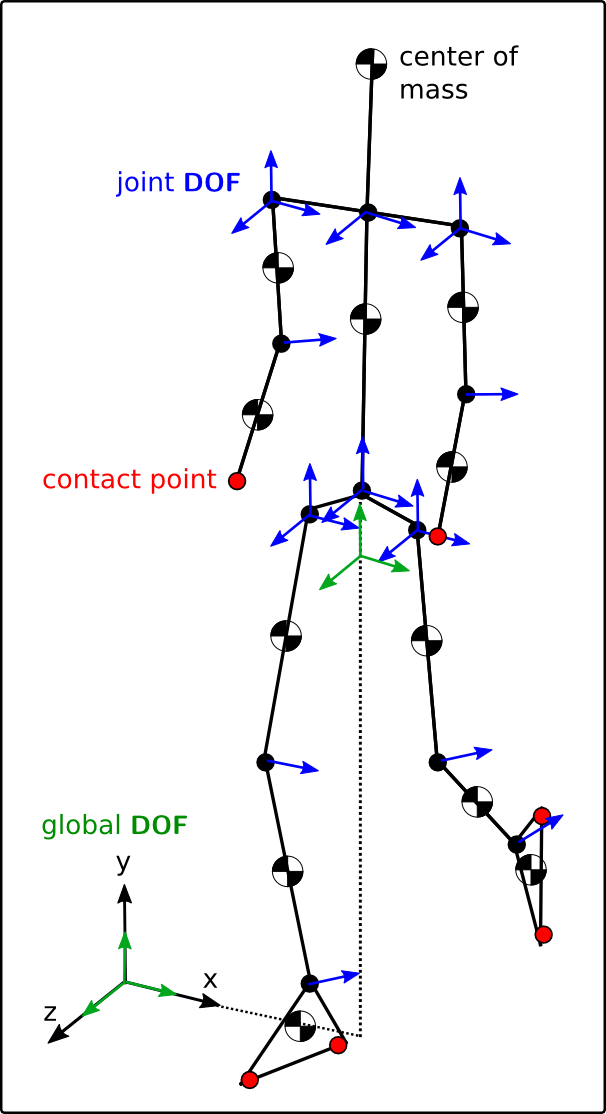
Interior joint torques and forces are estimated fom motions by means of machine learning approaches. The necessary training data can be generated using predictive dynamics optimization based on a skeletal model of the human body.