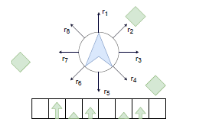
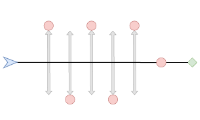
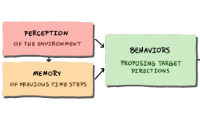
Developing believable multi-agent simulations often relies on the use of steering algorithms. In contrast to path-finding, steering algorithms make short-term choices on the next movement based on their local environment. While those are very performant, designing the behavior of steering agents in complex environments is a challenging task.
Previous work concentrated on single-objective steering, which makes it hard to define the objective such that the desired movement behavior emerges. At the TNT, we work on generalizing the steering framework to make it compatible with multi-objective task definitions and integrate performant decision-making algorithms. This results in smoother agent behavior and reduces the frequency of deadlock situations.